目录
- Vulkan 开发的系列文章:
- 进击的 Vulkan 移动开发(一)之今生前世
- 进击的 Vulkan 移动开发(二)之谈谈对渲染流程的理解
- 进击的 Vulkan 移动开发之 Instance & Device & Queue
此篇文章继续学习 Vulkan 中的组件:Command-Buffer 。
 在前面的文章中,我们已经创建了
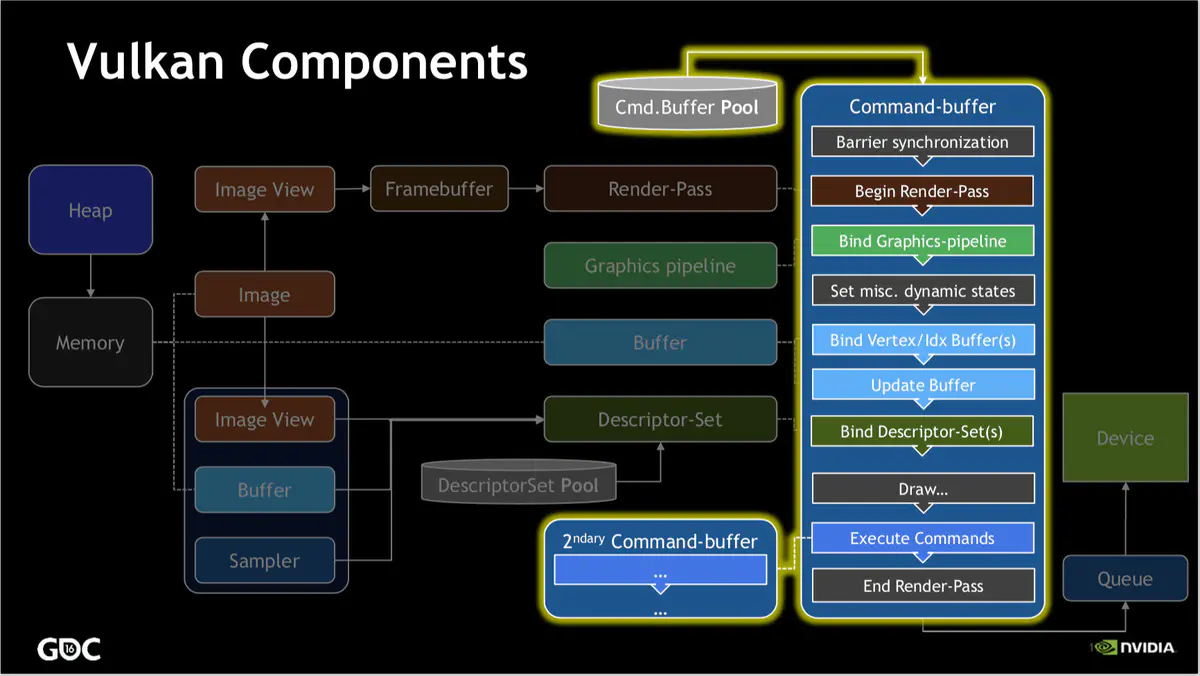
在前面的文章中,我们已经创建了 Instance、Device、Queue三个组件,并且知道了Queue组件是用来和物理设备沟通的桥梁,而具体的沟通过程就需要Command-Buffer(命令缓冲区)组件,它是若干命令的集合,我们向Queue提交Command-Buffer,然后才交由物理设备 GPU 进行处理。
Command-Pool 组件
在创建 Command-Buffer 之前,需要创建 Command-Pool 组件,从 Command-Pool 中去分配 Command-Buffer 。
还是老套路,我们需要先创建一个 VkXXXXCreateInfo 的结构体,结构体每个参数的释义还是要多看官方的文档。
// 创建 Command-Pool 组件
VkCommandPool command_pool;
VkCommandPoolCreateInfo poolCreateInfo = {};
poolCreateInfo.sType = VK_STRUCTURE_TYPE_COMMAND_POOL_CREATE_INFO;
// 可以看到 Command-Pool 还和 Queue 相关联
poolCreateInfo.queueFamilyIndex = info.graphics_queue_family_index;
// 标识命令缓冲区的一些行为
poolCreateInfo.flags = VK_COMMAND_POOL_CREATE_RESET_COMMAND_BUFFER_BIT;
// 具体创建函数的调用
vkCreateCommandPool(info.device, &poolCreateInfo, nullptr, &command_pool);
有几个参数需要注意:
queueFamilyIndex参数为创建Queue时选择的那个queueFlags为VK_QUEUE_GRAPHICS_BIT的索引,从Command-Pool中分配的的Command-Buffer必须提交到同一个Queue中。flags有如下的选项,分别指定了Command-Buffer的不同特性:
typedef enum VkCommandPoolCreateFlagBits {
VK_COMMAND_POOL_CREATE_TRANSIENT_BIT = 0x00000001,
VK_COMMAND_POOL_CREATE_RESET_COMMAND_BUFFER_BIT = 0x00000002,
VK_COMMAND_POOL_CREATE_FLAG_BITS_MAX_ENUM = 0x7FFFFFFF
} VkCommandPoolCreateFlagBits;
-
VK_COMMAND_POOL_CREATE_TRANSIENT_BIT
- 表示该
Command-Buffer的寿命很短,可能在短时间内被重置或释放
- 表示该
-
VK_COMMAND_POOL_CREATE_RESET_COMMAND_BUFFER_BIT
- 表示从
Command-Pool中分配的Command-Buffer可以通过vkResetCommandBuffer或者vkBeginCommandBuffer方法进行重置,如果没有设置该标识位,就不能调用vkResetCommandBuffer方法进行重置。
- 表示从
Command-Buffer 组件
接下来就是从 Command-Pool 中分配 Command-Buffer,通过 VkCommandBufferAllocateInfo 函数。
首先需要一个 VkCommandBufferAllocateInfo 结构体表示分配所需要的信息。
typedef struct VkCommandBufferAllocateInfo {
VkStructureType sType;
const void* pNext;
VkCommandPool commandPool; // 对应上面创建的 command-pool
VkCommandBufferLevel level;
uint32_t commandBufferCount; // 创建的个数
} VkCommandBufferAllocateInfo;
这里有个参数也要注意:
VkCommandBufferLevel指定Command-Buffer的级别。
有如下级别可以使用:
typedef enum VkCommandBufferLevel {
VK_COMMAND_BUFFER_LEVEL_PRIMARY = 0,
VK_COMMAND_BUFFER_LEVEL_SECONDARY = 1,
VK_COMMAND_BUFFER_LEVEL_BEGIN_RANGE = VK_COMMAND_BUFFER_LEVEL_PRIMARY,
VK_COMMAND_BUFFER_LEVEL_END_RANGE = VK_COMMAND_BUFFER_LEVEL_SECONDARY,
VK_COMMAND_BUFFER_LEVEL_RANGE_SIZE = (VK_COMMAND_BUFFER_LEVEL_SECONDARY - VK_COMMAND_BUFFER_LEVEL_PRIMARY + 1),
VK_COMMAND_BUFFER_LEVEL_MAX_ENUM = 0x7FFFFFFF
} VkCommandBufferLevel;
一般来说,使用 VK_COMMAND_BUFFER_LEVEL_PRIMARY 就好了。
具体创建代码如下:
VkCommandBuffer commandBuffer[2];
VkCommandBufferAllocateInfo command_buffer_allocate_info{};
command_buffer_allocate_info.sType = VK_STRUCTURE_TYPE_COMMAND_BUFFER_ALLOCATE_INFO;
command_buffer_allocate_info.commandPool = command_pool;
command_buffer_allocate_info.commandBufferCount = 2;
command_buffer_allocate_info.level = VK_COMMAND_BUFFER_LEVEL_PRIMARY;
vkAllocateCommandBuffers(info.device, &command_buffer_allocate_info, commandBuffer);
Command-Buffer 的生命周期
创建了 Command-Buffer 之后,来了解一下它的生命周期,如下图:
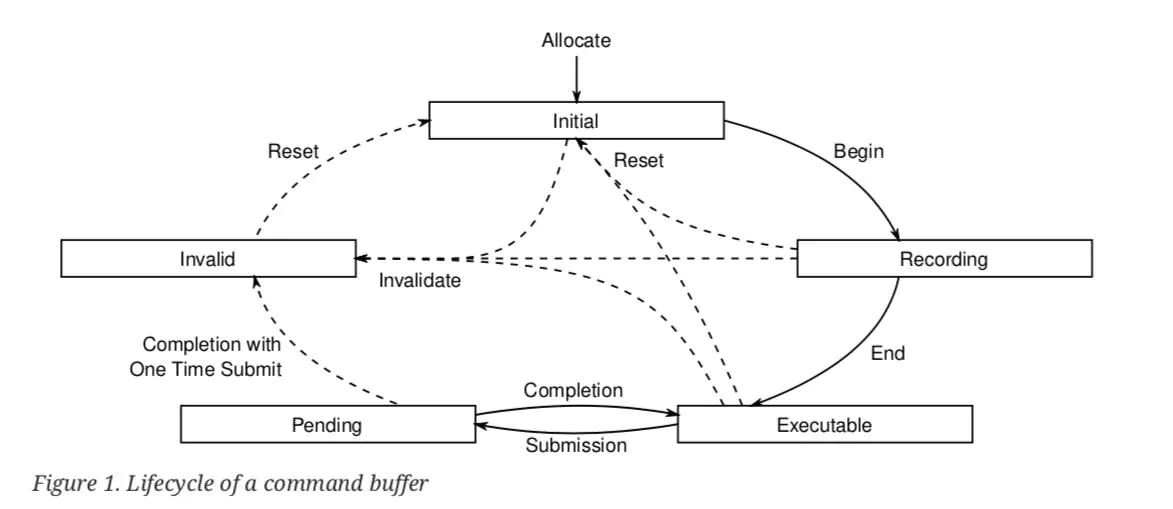
- Initial 状态
在 Command-Buffer 刚刚创建时,它就是处于初始化的状态。从此状态,可以达到 Recording 状态,另外,如果重置之后,也会回到该状态。
- Recording 状态
调用 vkBeginCommandBuffer 方法从 Initial 状态进入到该状态。一旦进入该状态后,就可以调用 vkCmd* 等系列方法记录命令。
- Executable 状态
调用 vkEndCommandBuffer 方法从 Recording 状态进入到该状态,此状态下,Command-Buffer 可以提交或者重置。
- Pending 状态
把 Command-Buffer 提交到 Queue 之后,就会进入到该状态。此状态下,物理设备可能正在处理记录的命令,因此不要在此时更改 Command-Buffer,当处理结束后,Command-Buffer 可能会回到 Executable 状态或者 Invalid 状态。
- Invalid 状态
一些操作会使得 Command-Buffer 进入到此状态,该状态下,Command-Buffer 只能重置、或者释放。
Command-Buffer 的记录与提交
现在可以尝试着记录一些命令,提交到 Queue 上了,命令记录的调用过程如下图:
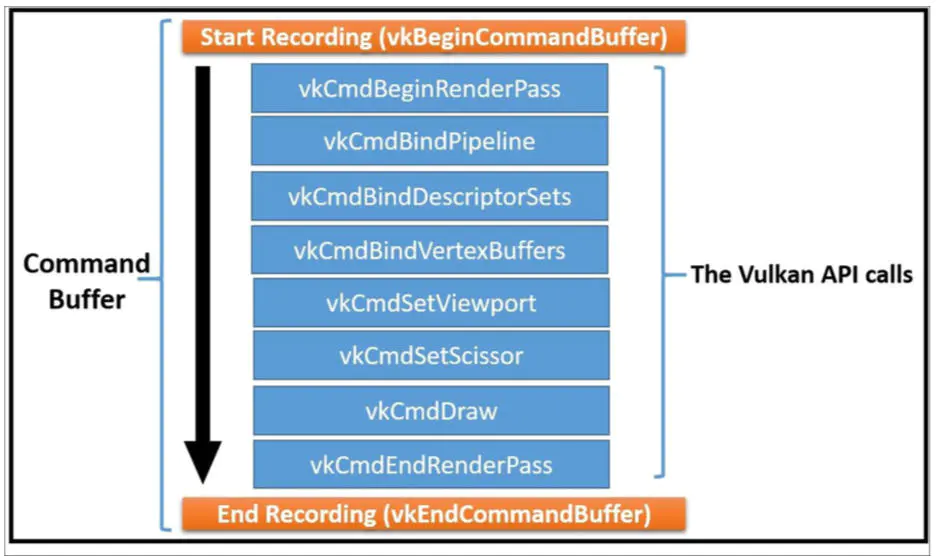
在 vkBeginCommandBuffer 和 vkEndCommandBuffer 方法之间可以记录和渲染相关的命令,这里先不考虑中间的过程,直接创建提交。
begin 阶段
VkCommandBufferBeginInfo beginInfo = {};
beginInfo.sType = VK_STRUCTURE_TYPE_COMMAND_BUFFER_BEGIN_INFO;
beginInfo.flags = VK_COMMAND_BUFFER_USAGE_ONE_TIME_SUBMIT_BIT;
vkBeginCommandBuffer(commandBuffer[0], &beginInfo);
首先,还是需要创建一个 VkCommandBufferBeginInfo 结构体用来表示 Command-Buffer 开始的信息。
这里要注意的参数是 flags ,表示 Command-Buffer 的用途,
typedef enum VkCommandBufferUsageFlagBits {
VK_COMMAND_BUFFER_USAGE_ONE_TIME_SUBMIT_BIT = 0x00000001,
VK_COMMAND_BUFFER_USAGE_RENDER_PASS_CONTINUE_BIT = 0x00000002,
VK_COMMAND_BUFFER_USAGE_SIMULTANEOUS_USE_BIT = 0x00000004,
VK_COMMAND_BUFFER_USAGE_FLAG_BITS_MAX_ENUM = 0x7FFFFFFF
} VkCommandBufferUsageFlagBits;
- VK_COMMAND_BUFFER_USAGE_ONE_TIME_SUBMIT_BIT
- 表示该 Command-Buffer 只使用提交一次,用完之后就会被重置,并且每次提交时都需要重新记录
end 阶段
直接调用 vkEndCommandBuffer 方法就可以结束记录,此时就可以提交了。
vkEndCommandBuffer(commandBuffer[0]);
buffer 提交
通过 vkQueueSubmit 方法将 Command-Buffer 提交到 Queue 上。
同样的还是需要创建一个 VkSubmitInfo 结构体:
typedef struct VkSubmitInfo {
VkStructureType sType;
const void* pNext;
uint32_t waitSemaphoreCount; // 等待的 Semaphore 数量
const VkSemaphore* pWaitSemaphores; // 等待的 Semaphore 数组指针
const VkPipelineStageFlags* pWaitDstStageMask; // 在哪个阶段进行等待
uint32_t commandBufferCount; // 提交的 Command-Buffer 数量
const VkCommandBuffer* pCommandBuffers; // 具体的 Command-Buffer 数组指针
uint32_t signalSemaphoreCount; //执行结束后通知的 Semaphore 数量
const VkSemaphore* pSignalSemaphores; //执行结束后通知的 Semaphore 数组指针
} VkSubmitInfo;
它的参数比较多,并且涉及到 Command-Buffer 之间的同步关系了,这里简单说一下,后面再细说这一块。
如下图,Vulkan 中有 Semaphore、Fences、Event、Barrier 四种机制来保证同步。
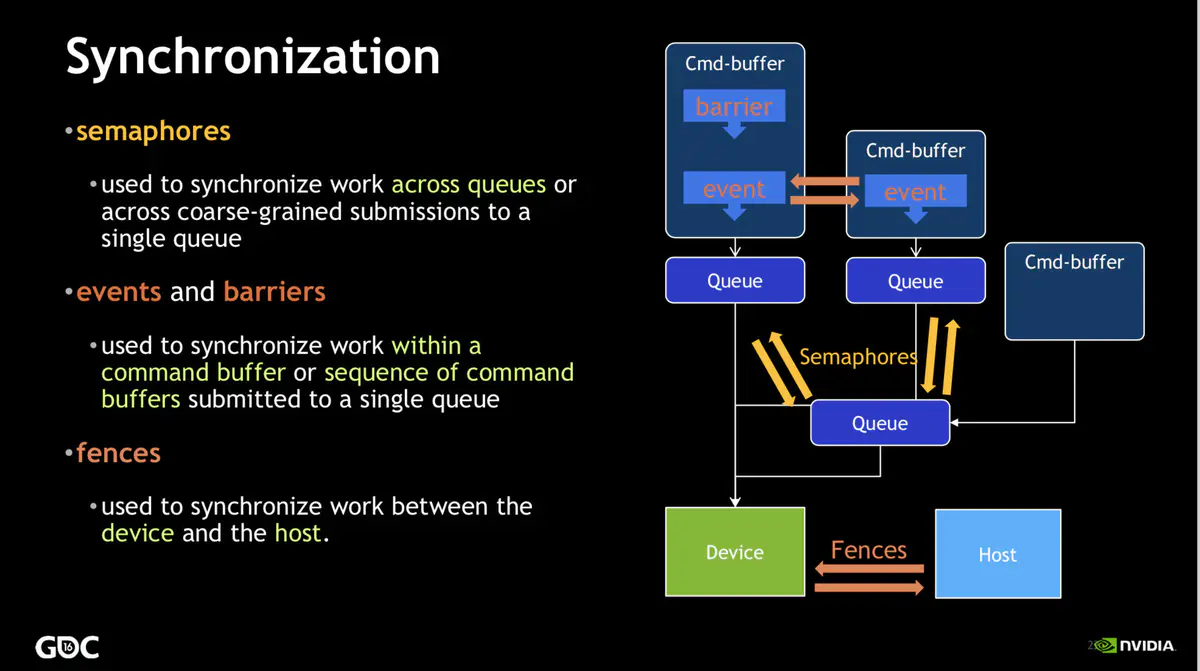
简单说一下 Semaphore 和 Fence 。
-
SemaphoreSemaphore的作用主要是用来向Queue中提交Command-Buffer时实现同步。比如说某个Command-Buffer-B在执行的某个阶段中需要等待另一个Command-Buffer-A执行成功后的结果,同时Command-Buffer-C在某阶段又要要等待Command-Buffer-B的执行结果,那么就应该使用Semaphore机制实现同步;- 此时
Command-Buffer-B提交到Queue时就需要两个VkSemaphor,一个表示它需要等待的Semaphore,并且指定在哪个阶段等待;一个是它执行结束后发出通知的Semaphore。
-
FenceFence的作用主要是用来保证物理设备和应用程序之间的同步,比如说向Queue中提交了Command-Buffer后,具体的执行交由物理设备去完成了,这是一个异步的过程,而应用程序如果要等待执行结束,就要使用Fence机制。
Semaphore 和 Fence 有相同之处,但是使用场景却不一样,就如图所示。
Semaphore 和 Fence 的创建过程如下,和以往的 Vulkan 创建对象的调用方式没有太大区别:
// 创建 Semaphore
VkSemaphore imageAcquiredSemaphore;
VkSemaphoreCreateInfo semaphoreCreateInfo = {};
semaphoreCreateInfo.sType = VK_STRUCTURE_TYPE_SEMAPHORE_CREATE_INFO;
vkCreateSemaphore(info.device, &semaphoreCreateInfo, nullptr, &imageAcquiredSemaphore);
// 创建 Fence
VkFence drawFence;
VkFenceCreateInfo fenceCreateInfo = {};
fenceCreateInfo.sType = VK_STRUCTURE_TYPE_FENCE_CREATE_INFO;
// 该参数表示 Fence 的状态,如果不设置或者为 0 表示 unsignaled state
fence_info.flags = 0;
vkCreateFence(info.device, &fenceCreateInfo, nullptr, &drawFence);
继续回到 VkSubmitInfo 结构体中,如果只是简单的提交 Command-Buffer,那就不需要考虑 Semaphore 这些同步机制了,把相应的参数都设置为 nullptr,或者直接不设置也行,最后提交就好了,代码如下:
// 简单的提交过程
// 开始记录
VkCommandBufferBeginInfo beginInfo1 = {};
beginInfo1.sType = VK_STRUCTURE_TYPE_COMMAND_BUFFER_BEGIN_INFO;
beginInfo1.flags = VK_COMMAND_BUFFER_USAGE_ONE_TIME_SUBMIT_BIT;
vkBeginCommandBuffer(commandBuffer[0], &beginInfo1);
// 省略中间的 vkCmdXXXX 系列方法
// 结束记录
vkEndCommandBuffer(commandBuffer[0]);
VkSubmitInfo submitInfo1 = {};
submitInfo1.sType = VK_STRUCTURE_TYPE_SUBMIT_INFO;
// pWaitSemaphores 和 pSignalSemaphores 都不设置,只是提交
submitInfo1.commandBufferCount = 1;
submitInfo1.pCommandBuffers = &commandBuffer[0];
// 注意最后的参数 临时设置为 VK_NULL_HANDLE,也可以设置为 Fence 来同步
vkQueueSubmit(info.queue, 1, &submitInfo1, VK_NULL_HANDLE);
以上就完成了 Command-Buffer 提交到 Queue 的过程,省略了 Semaphores 和 Fences 的同步机制,当然也可以把它们加上。
在 vkQueueSubmit 的最后一个参数设置为了 VK_NULL_HANDLE ,这是 Vulkan 中设置为 NULL 的一个方法(其实是设置了一个整数 0 ),也可以设置了 Fence ,表示我们要等待该 Command-Buffer 在 Queue 执行结束,虽说 Command-Buffer 也可以通过 Semaphore 来表示执行结束,但这两种方式的使用场景不一样。
回到 Fence 的创建过程,其中有一个 flags 参数表示 Fence 的状态,有如下两种状态:
- signaled state
- 如果 flags 参数为 VK_FENCE_CREATE_SIGNALED_BIT 则表示创建后处于该状态。
- unsignaled state
- 默认的状态。
当 vkQueueSubmit 的最后参数传入 Fence 后,就可以通过 Fence 等待该 Command-Buffer 执行结束。
// wait fence to enter the signaled state on the host
// 错误的 waitForFences 使用,因为它并不是一个阻塞的方法
// VkResult res = vkWaitForFences(info.device, 1, &fence, VK_TRUE, UINT64_MAX);
VkResult res;
do {
res = vkWaitForFences(info.device, 1, &fence, VK_TRUE, UINT64_MAX);
} while (res == VK_TIMEOUT);
vkWaitForFences 方法会等待 Fence 进入 signaled state 状态,该方法的调用要放在 while 循环中,因为它并不是一个阻塞的方法,可以理解成一个状态查询,如果结果不对,返回的是 VK_TIMEOUT,结果满足要求才返回 VK_SUCCESS 。
当 Command-Buffer 执行结束后,传入的 Fence 参数就会从 unsignaled state 进入到 signaled state ,从而触发 vkWaitForFences 调用结束循环,表明执行结束了。
这就是 Fence 的使用,至于 Command-Buffer 之间通过 Semaphore 来同步的示例,详见后续文章。
参考
文章中的代码地址,具体可以参考我的 Github 项目:
总结
本篇文章主要讲解了 Command-Buffer 的使用和提交,并且涉及到了 Vulkan 的一些同步机制。
具体和渲染有关的操作,都要在 Command-Buffer 之间记录,结束记录之后提交给 Queue ,让 GPU 去执行具体的操作,当然具体执行是一个异步的过程,需要用到同步机制。
Semaphore 和 Fence 都可以实现同步,但使用场景不同。
原创文章,转载请注明来源: 进击的 Vulkan 移动开发之 Command Buffer